
Drones are an amazing technological creation in human history. They are formally known as Unmanned aerial systems (UAS) or unmanned aerial vehicles (UAV) due to their unmanned capabilities and they are not used for manned missions.
Generally for controlling a drone, human operators are needed with their remote control capability. To control a drone remotely, we need a RC transmitter and Receiver unit. There are several companies that build transmitters and receivers. One of the most common models are ‘flysky’ RC model technology co.ltd.
But with recent technological advancements and specially the recent rapid developments of Artificial intelligence, now drones can perform fully autonomously and complete the entire mission by their own decision making processes.
Autonomous UAVs:
Autonomous UAVs or drones are advanced aerial vehicles that are capable of performing tasks and completing missions by self-decision making processes without human operators. Autonomous drones are just like self-driving cars. There are several tasks that needed to be done for autonomous flying capability.
Advantages:
The primary benefit of utilizing drones lies in their ability to execute critical functions without the need for direct human intervention. Tasks such as routine inspections and product transportation can be fully automated.
Moreover, drones exhibit remarkable versatility in their applications and capabilities. They are capable of accessing hazardous industrial sites, surveying extensive agricultural areas in a matter of minutes, and navigating swiftly and safely within warehouse settings.
These attributes collectively position drones as a significant cost-saving solution for numerous enterprises, while simultaneously enhancing the precision of remote monitoring and ensuring the safety of employees.
This advancement paves the way for new opportunities in any sector that requires substantial processing capabilities. In the realm of research, quantum computing is being explored to derive insights from vast data sets and to conduct projects on an unprecedented scale. Additionally, it holds the promise of facilitating highly detailed and dependable simulations, thereby allowing organizations to experiment and innovate with greater assurance.
Software requirements:
For building a autonomous drone. Python can be used primarily. Now lets discuss why python is important for autonomous vehicle building.
Importance of Python:
As mentioned before, Python is the main programming language we are using for building autonomous vehicles. There are other programming languages such as C and Java can also be used for this purpose.
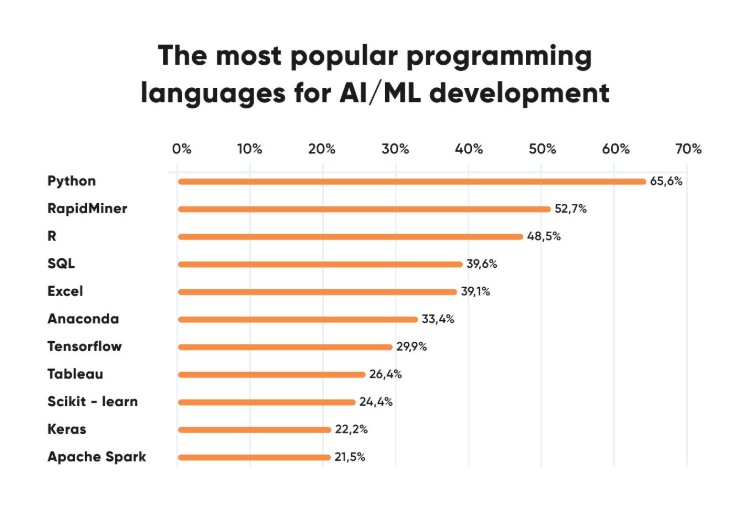
previous figure shows that the
Beside Python, there are several other package requirements that needed to be installed for drone building.
1. Pymavlink:
Pymavlink is a python package/suite for python programming language. It is simply the python implementation of MAVlink protocol. With pymavlink, it is possible to create a python script to read sensor data and send commands to an ArduSub vehicle.
To install:
pip install pymavlink2. dronekit-python
This is formally known as droneAPI-Python. This is a python library that is specifically built to drone operations. It provides programmatic access to a connected vehicle’s telemetry, state and parameter information, and enables both mission management and direct control over vehicle movement and operations.
pip install dronekit3. open-cv
Open cv is another important python package. one of the major input devices for a drone is installed camera modules. these cameras can send input visual data into onboard computers for decision making process. for that opencv can be used. OpenCV is a opensource python library that has been built for computer vision and machine learning purposes.
pip install cv24. Pi-camera:
pi-camera is another python package/library that is used for operating raspberry pi-based camera modules.
the installation command:
pip install picamera2This library is specifically built for Linux-based operating systems such as raspberry pi OS. So, if you are writing the code in a windows or apple OS-based computer, the library wont be able to install properly.
5. RPi.GPIO:
This is a major python-based library that is need to operate a Raspberry pi-based computer. The primary use of this library is to operate raspberry pi computer’s general purpose input/output (GPIO) pins.
This library is also works on a Linux-based OS only.
pip install RPi.GPIOgpio:
This is also a another major library for raspberry pi computer operation. The primary purpose of this library is to provide a program the access to General purpose input/output via Linux surfaces.
t is intended to mimic RPIO as much as possible for all features, while also supporting additional (and better named) functionality to the same methods.
pip install gpiogpiozero:
this is also a Python package that provides classes and functions for controlling GPIO pins on a Raspberry Pi. It’s included in the Raspberry Pi Operating System, but can also be installed on other distros.
gpiozero can be used as an alternative for RPi.GPIO.
pip install gpiozeroFunctions:
For operating a drone autonomously. there should be pre-programmed functions as drone instructions. The functions are being designed to control drones main movements and perform major tasks based on their input data.
There are four main functions to consider first.
- arming: for starting the drone functions
- taking-off: starting to taking off and reach a target altitude
- hoover: hoovering over specific altitude
- landing: safely landing back.
Autonomous take-off and landing:
The first basic functions that needs to be addressed are taking-off and landing.
For take-off, first the drone must be in a stable situation, where all the equipment that needs for taking off starting to perform their desired function.
When this function is activated, the drone will start to begin its equipment such as motors. flight controller, propellers, etc.
Here is are sample code for self-arming autonomous take off:
# arm and take off function:
# arm: this is for starting the drone for fully powered
# take off: taking off from gorund level
def arm_and_takeoff(aTargetAltitude):
print("V1 drone is starting to arm...")
while not V1D.is_armable:
# sleep for one sec:
time.sleep(1)
print('Motors are starting to rotate..')
print("Motors have started..")
V1D.mode = VehicleMode("GUIDED") # This is th guided mode commoand from ardupilot mission planner
# arming:
V1D.armed = True
# confirming armed:
while not V1D.armed:
time.sleep(1)
# start to taking off:
V1D.simple_takeoff(aTargetAltitude)
# this will take the drone for a specific given altitde level.
# first wait until the drone reach target altitude:
# then any other function can be executed:
# accuracy for target altitude : 0.95
# just before reacing the target altitude function should be breaked
while True:
if V1D.location.global_relative_frame.alt >= aTargetAltitude*0.95:
break
time.sleep(1)
# initializing the function:
# 10 is the target altitude in ft
arm_and_takeoff(10)for landing, the mavlink protocol already have an specific command. We just have to write a code that will activate the command.
For autonomous landing you can refer following sample code structure:
# this is the function for landing back:
def land():
print("V1Drone is ready to land back...")
V1D.mode = VehicleMode("LAND")
print("Drone is landing")
time.sleep(1)
print("Drone has landed safely. ending mission")
time.sleep(1)
# finishing the mission:
print("mission succesfully completed...")
time.sleep(1)
# initialize the function:
land()
Just like I described before, the main functionalities can be achieved through programs that is built on python programming language.
for autonomous flight, there are two main needs.
- input devices
- computing devices
1. Input devices:
Input devices can be mainly sensors. these sensor include Lidar, Ultrasonic, air speed sensors, gyroscope, accelerometer, barometer etc.
most of these sensors are already built-in inside the flight controller device. typically the flight controller acts as the brain or heart of the drone.

but for the autonomous and intelligent drone designs, only a flight controller is not enough. To execute high-end python, java or C programs, there is a need for an onboard single board computer devices. The most common computer is Raspberry pi.
To collect data that can be analysed by the computer device, there are several external input devices that can be used.
1. Cameras:
visual inputs are vital for autonomous flight capabilities. the input visual data that is captured by onboard camera/s are being analysed in real time by using two of AIs major subfields; Machine learning algorithms and computer vision.
Then computer unit will make decision to change drones operation process.
2. LiDAR:
light detection and ranging is another major input device that can be used in autonomous vehicles. they are commonly used in modern self driving cars. In LiDAR, laser is being used to detect object and their distance for real time mapping and obstacle avoidance purposes.
3. Ultrasonice:
ultrasonic sensors are also being used for object detection and obstacle avoidance purposes. they are not powerful as LiDAR sensors and has a short detection range.
like previously mentioned, there are several devices that can be used for input data gathering.
I have written several articles in my website on the topic of autonomous vehicles (mainly UAVs) designing and building. You can check them for more details on the topic. I will put the links below.