
For an intelligent aerial vehicle or autonomous vehicle system, one of the most important and essential part is planning the path based on surroundings/environment. So, in this article I will discuss about the process of autonomous path planning for an intelligent drone.
Path planning for an autonomous vehicle is the process of determining the best possible route or trajectory that the vehicle should follow to reach its destination safely, efficiently, and without collisions. This is a core component of autonomous navigation and involves various levels of decision-making.
Simply, let’s say that a drone is at this location, and it needs to go to a certain destination. Primarily, we can give the location in a firmware such as ardupilot mission planner and give the command to the drone. But this is very simple and basic. So, we have to use the remote control to control the drone while reaching the target location. The major thing about autonomous flight is detecting and avoiding obstacles. Then planning the path to move from one point to another point by avoiding obstacles.
Building a state of art obstacle avoidance system is always in my mind due to its importance for autonomous flight capabilities.
Computer vision:
Computer vision is a major subfield of Artificial Intelligence. The simple definition of computer vision is to enable the ability for machines/computers to understand the surroundings and physical world by analyzing the visual input data.
Autonomous path planning is primarily dependent on computer vision and artificial intelligence. Major autonomous car manufacturers such as ‘Tesla’ are using computer vision for their self-driving. Among the input data types, visual input data have a major impact when it comes to real-time accuracy.
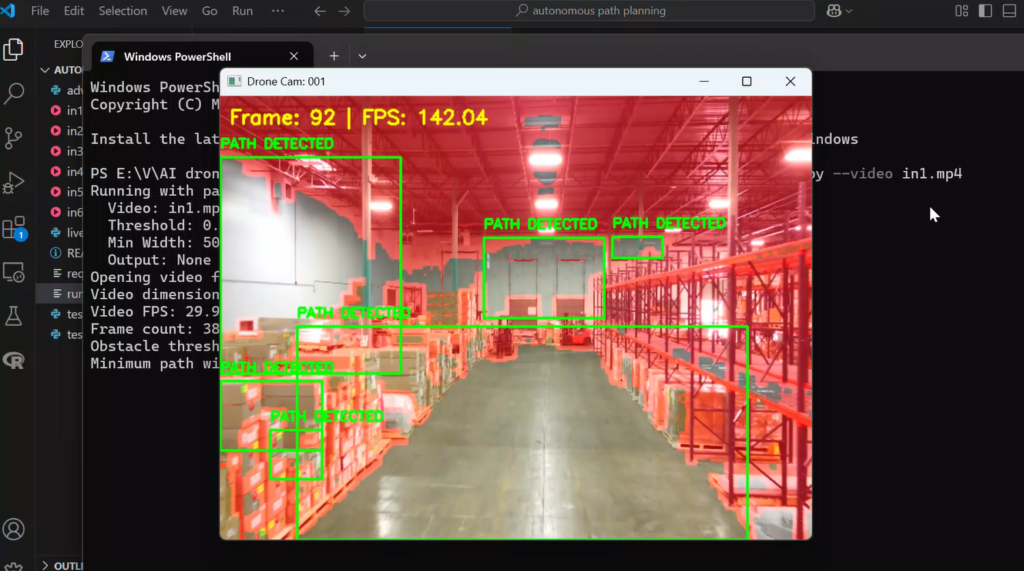
The first part of autonomous path planning is to detect obstacles. These obstacles can be either static or dynamic. To detect obstacles, the best approach is to gather visual input data and send them through machine learning/deep learning algorithms that can detect data patterns for self-decision-making ability. The ML algorithm will detect and classify the obstacles in the frames. system will then look for cleared areas and mark them as potential paths for the drone to move.
The path-planning system I have built has two different detection types. Normal detection mode can detect almost every potential clear path in the frame, while advanced mode can filter it to the most suitable path.

different techniques for path planning:
Computer vision is not the only technology we can use for autonomous technology.
LiDAR:
Lidar, or Light detection and Ranging, is another major technology we can use for autonomous path planning. In this technology, we are using light as a form of laser pulses. The Lidar system will send these pulses in every direction, and when the pulses reach an object, they will reflect to detect back by the system.

A LiDAR system may use a scan mirror, multiple laser beams, or other means to “scan” the object space. With the ability to provide accurate measurement of distances, LiDAR can be used to solve many different problems.
In remote sensing, LiDAR systems are used to measure scatter, absorption, or re-emission from particles or molecules in the atmosphere. For these purposes, the systems may have specific requirements on the wavelength of the laser beams. The concentration of a specific molecular species in the atmosphere, e.g. methane and the aerosol loading, can be measured. Rain droplets in the atmosphere can be measured to estimate the distance of a storm and the rain fall rate.