

one of the major hardware components in building a unmanned aerial, ground or underwater vehicle is the mission controller/flight controller. It is responsible for basic and essential mission tasks.
There are several flight controllers in modern world for UAV building such as Ardupilot mega(APM), Pixhawk, mateksys, iFlight, etc. Ardupilot Mega or APM is an open source flight controller developed by volunteers and hobbyists.
for controlling a APM flight controller, we need a software/firmware that can be installed in the computer as drone-control simulator. Ardupilot has a simulator firmware called APM mission planner. The current version of mission planner is called ‘Mission planner 2.0’ or ‘Missionplanner2’.
For more details you can visit the official ardupilot website by clicking this link.
For the documentation and download the mission planner, You can go to ardupilot mission planner website.
today, most of the Ardupilot flight controller versions are very outdated. Specially APM 2.8 or older version are decades old and outdated. These hardware can noy be interconnected with modern Ardupilot firmware and mission planners (MissionPlanner2). So, nowadays, we cannot use latest versions of Ardupilot software for drone building with older hardware devices.
But still there are many websites and manufacturers that keep building older APM models and sell the for most affordable prices than other standard versions.
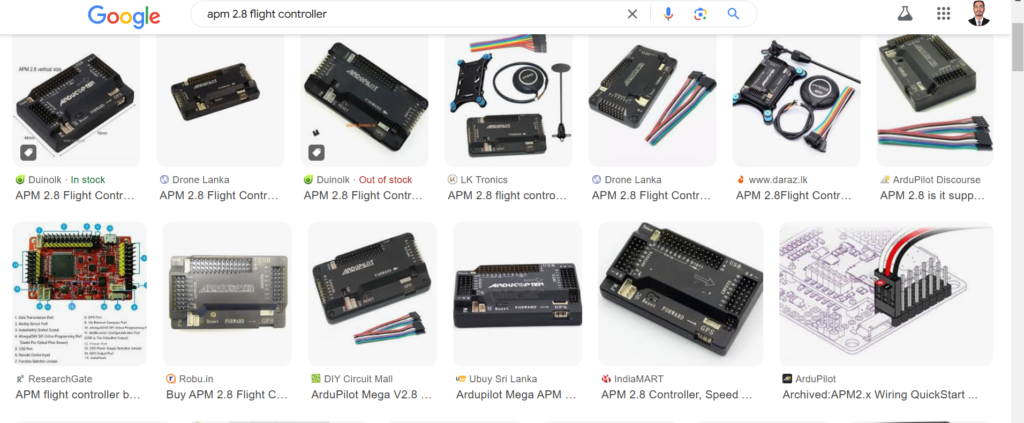
Previous figure shows that there are many cheap APM models that can be bought in online market yet not supported by newer versions of firmware.
So, if you have an older version of APM flight controller, it is important to know how to use it without any trouble.
First, we must download the older version of Ardupilot firmware. For download the firmware, please go through following link and download the APM planner 1.3.75. It is the latest version of older missionplanner1 program.
Secondly, connect the Ardupilot flight controller unit with GPS module. Ublox 7M is a popular GPS module for drone building. This module comes with a built-in compass unit.
Then goo to device manager and check whether the port is connected to computer properly. If it does, it will be showed like this:
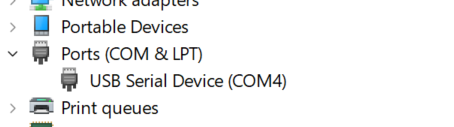
Now, we can connect the device to mission planner through port and install the necessary firmware from the initial setup. Then the next thing is to start calibrations.
Before starting the calibrations, we need to complete the initial setup. In the top right corner, there is a setup tab. click on it and following options will pop up.
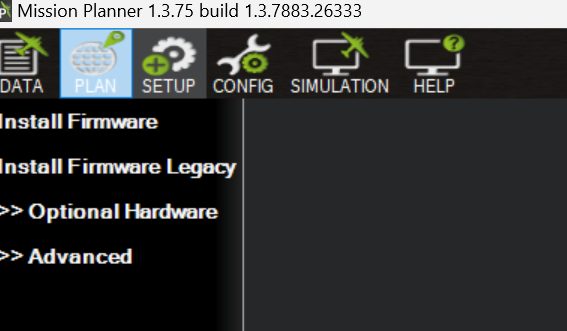
Then click on the install firmware and select which type of vehicle you want to operate. (E.G.: quadcopter, hexacopter, helicopter etc.)
For a UAV, the first step after installing the necessary firmware is to calibrate the flight controller unit. this is important procedure for a UAV as it will ensure that the drone will have accurate data and more secure flight capability.
After the calibration, the drone is finally ready for operating.
so, you can connect the controller device with mission planner by clicking the connect button in the top right corner.
now you can simply operate the drone by using the old mission planner software just like the newer version.